
Valero, Constantino; Krus, Anne; Cruz Ulloa, Christyan; Barrientos, Antonio; Cerro, Jaime and Ramirez, Juan José (2021) Single Plant Fertilization using a Robotic Platform in an Organic Cropping Environment. [Fertilización planta a planta empleando un robot en un entorno de cultivo ecológico.] In: Proceedings of AgEng2021, online.
![[thumbnail of image3.png]](https://orgprints.org/id/eprint/43101/2/image3.png)  Preview |
Image (PNG)
- English
895kB |
![[thumbnail of image4.png]](https://orgprints.org/id/eprint/43101/3/image4.png) 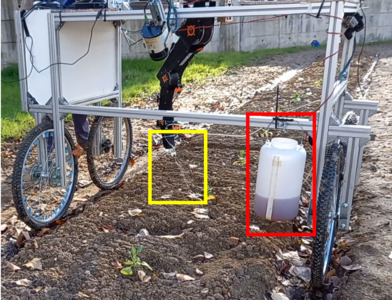 Preview |
Image (PNG)
- English
1MB |
![[thumbnail of image8.png]](https://orgprints.org/id/eprint/43101/4/image8.png) 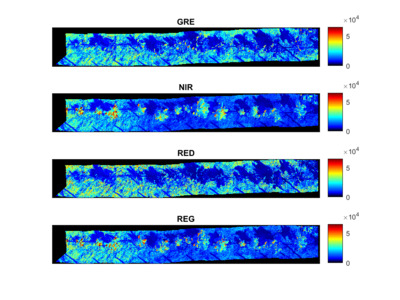 Preview |
Image (PNG)
- English
110kB |
![[thumbnail of image13.png]](https://orgprints.org/id/eprint/43101/5/image13.png) 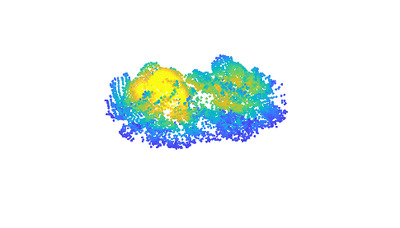 Preview |
Image (PNG)
- English
31kB |
![[thumbnail of image9.png]](https://orgprints.org/id/eprint/43101/6/image9.png) 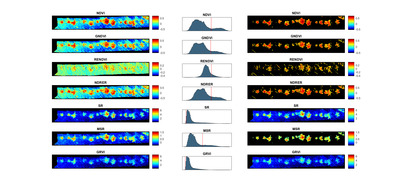 Preview |
Image (PNG)
- English
299kB |
![[thumbnail of image10.png]](https://orgprints.org/id/eprint/43101/7/image10.png) 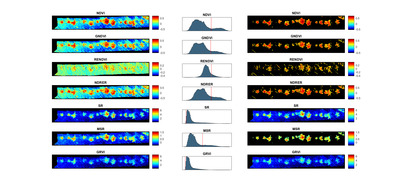 Preview |
Image (PNG)
- English
299kB |
![[thumbnail of image20.png]](https://orgprints.org/id/eprint/43101/8/image20.png) 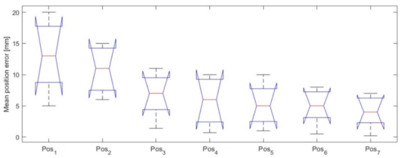 Preview |
Image (PNG)
- English
121kB |
![[thumbnail of image17.png]](https://orgprints.org/id/eprint/43101/9/image17.png) 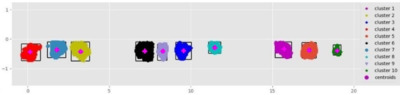 Preview |
Image (PNG)
- English
249kB |
![[thumbnail of image11.png]](https://orgprints.org/id/eprint/43101/10/image11.png) 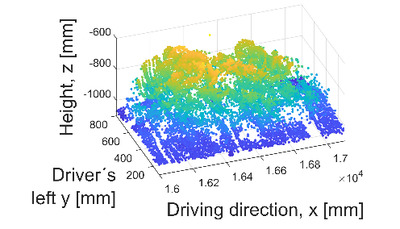 Preview |
Image (PNG)
- English
56kB |
![[thumbnail of image1.png]](https://orgprints.org/id/eprint/43101/11/image1.png)  Preview |
Image (PNG)
- English
1MB |
![[thumbnail of image14.png]](https://orgprints.org/id/eprint/43101/12/image14.png) 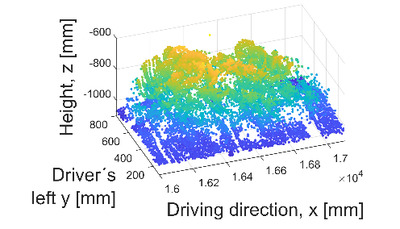 Preview |
Image (PNG)
- English
56kB |
![[thumbnail of image12.png]](https://orgprints.org/id/eprint/43101/13/image12.png)  Preview |
Image (PNG)
- English
18kB |
![[thumbnail of image5.png]](https://orgprints.org/id/eprint/43101/14/image5.png) 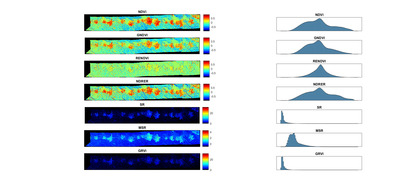 Preview |
Image (PNG)
- English
449kB |
![[thumbnail of image18.png]](https://orgprints.org/id/eprint/43101/15/image18.png) 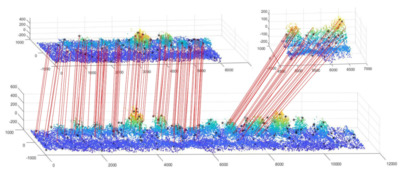 Preview |
Image (PNG)
- English
1MB |
![[thumbnail of image16.png]](https://orgprints.org/id/eprint/43101/16/image16.png)  Preview |
Image (PNG)
- English
31kB |
![[thumbnail of image6.png]](https://orgprints.org/id/eprint/43101/17/image6.png)  Preview |
Image (PNG)
- English
110kB |
![[thumbnail of image15.png]](https://orgprints.org/id/eprint/43101/18/image15.png)  Preview |
Image (PNG)
- English
18kB |
![[thumbnail of image2.png]](https://orgprints.org/id/eprint/43101/19/image2.png)  Preview |
Image (PNG)
- English
968kB |
![[thumbnail of image7.png]](https://orgprints.org/id/eprint/43101/20/image7.png)  Preview |
Image (PNG)
- English
449kB |
![[thumbnail of image19.png]](https://orgprints.org/id/eprint/43101/21/image19.png) 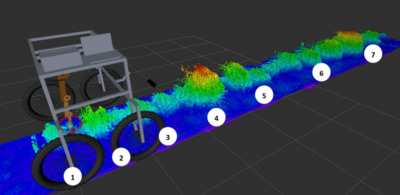 Preview |
Image (PNG)
- English
677kB |
![[thumbnail of image21.png]](https://orgprints.org/id/eprint/43101/22/image21.png)  Preview |
Image (PNG)
- English
5kB |
![[thumbnail of 4759_ageng2021_full_paper.pdf]](/style/images/fileicons/application_pdf.png) |
PDF
- Published Version
- English
1MB |
Summary in the original language of the document
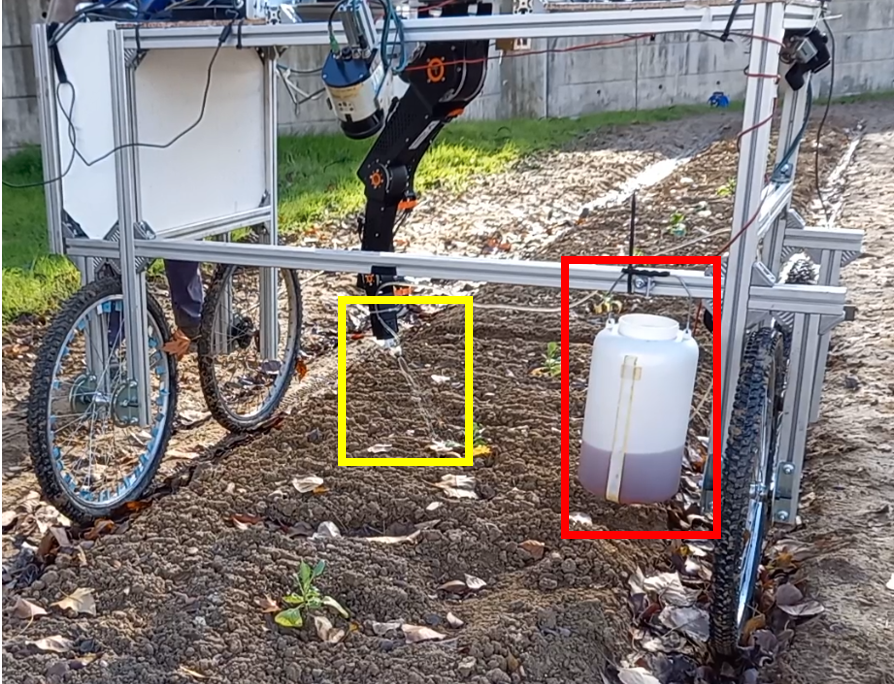
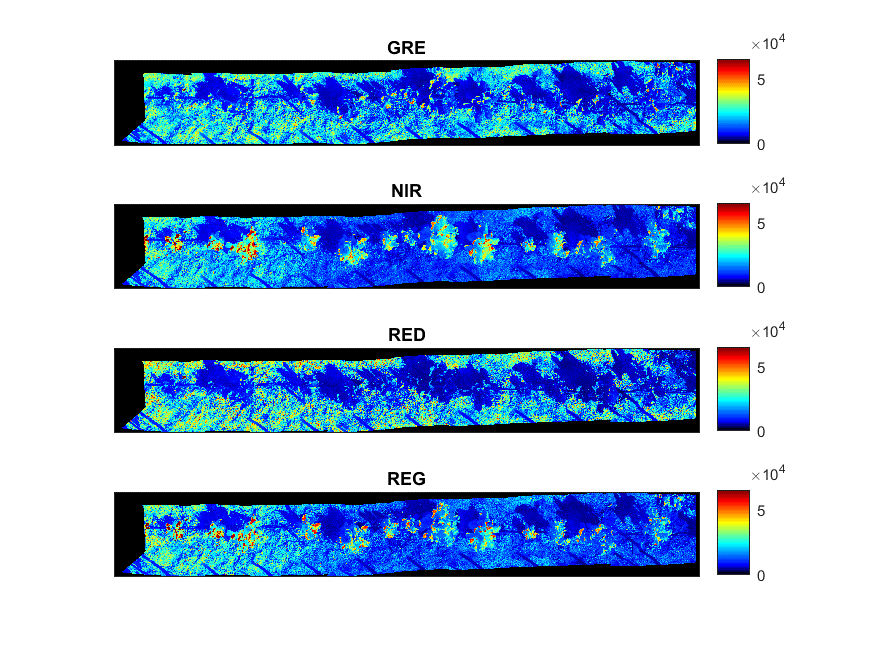
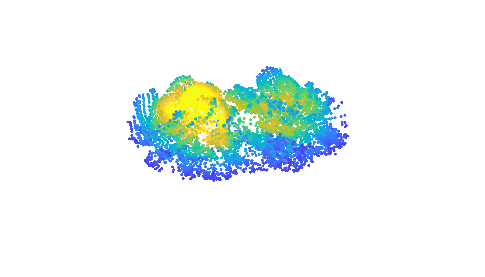
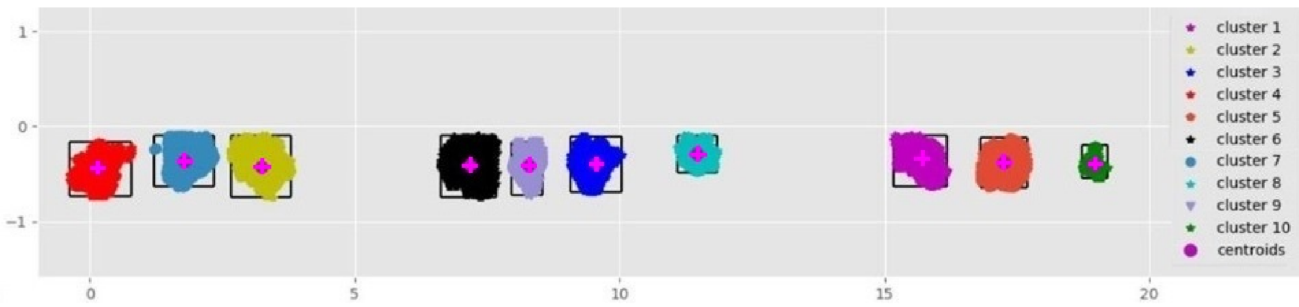
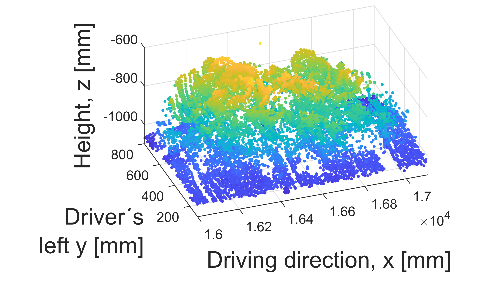
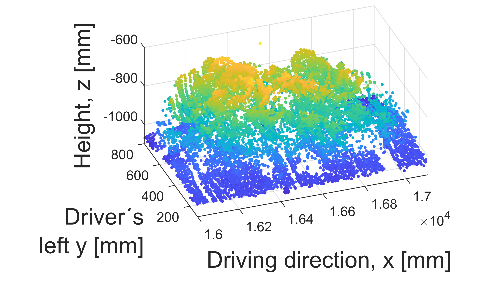
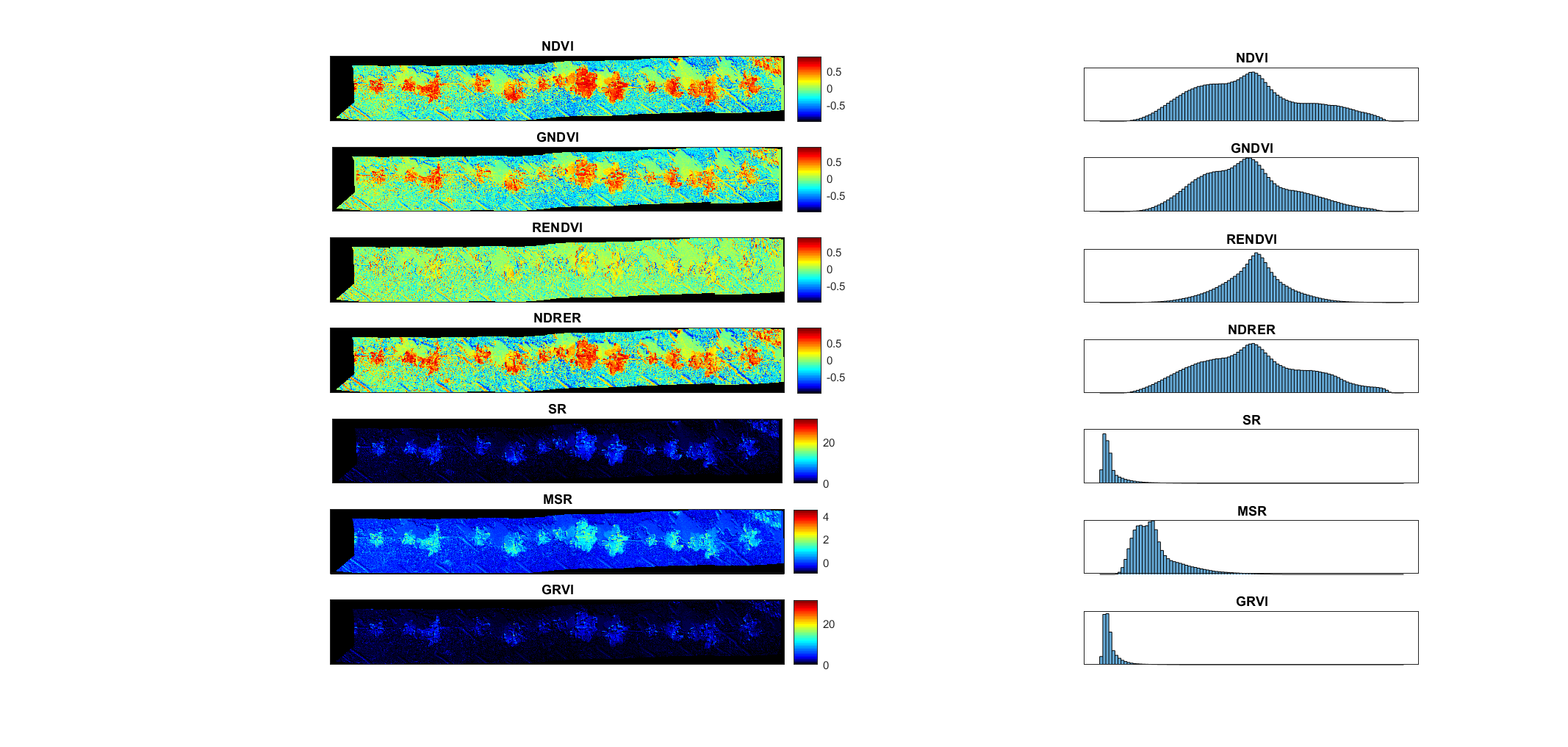
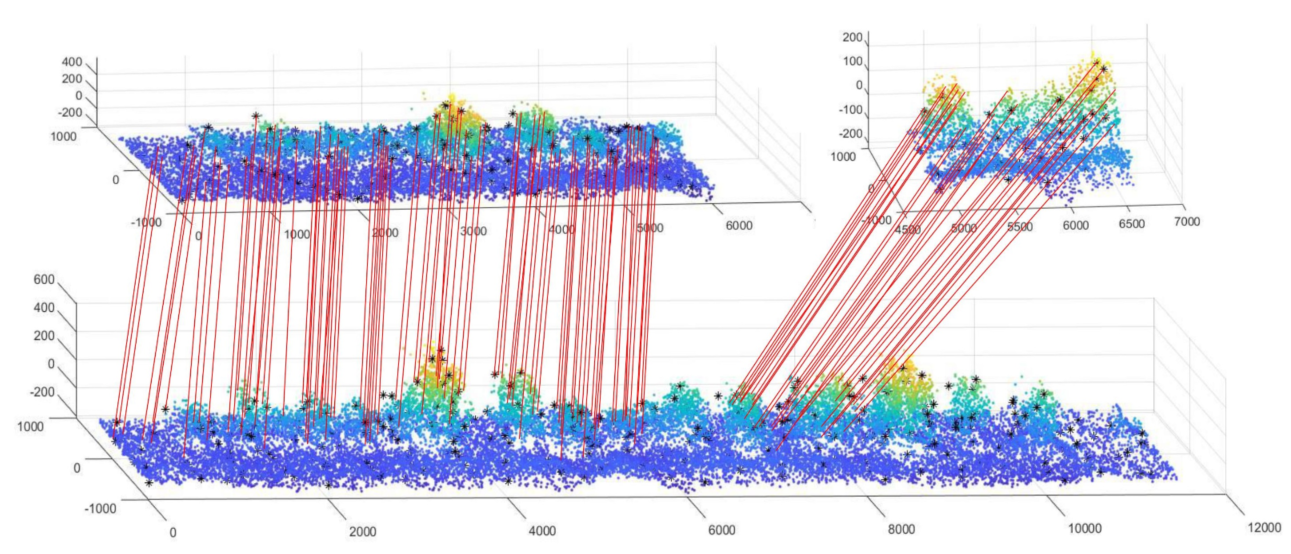
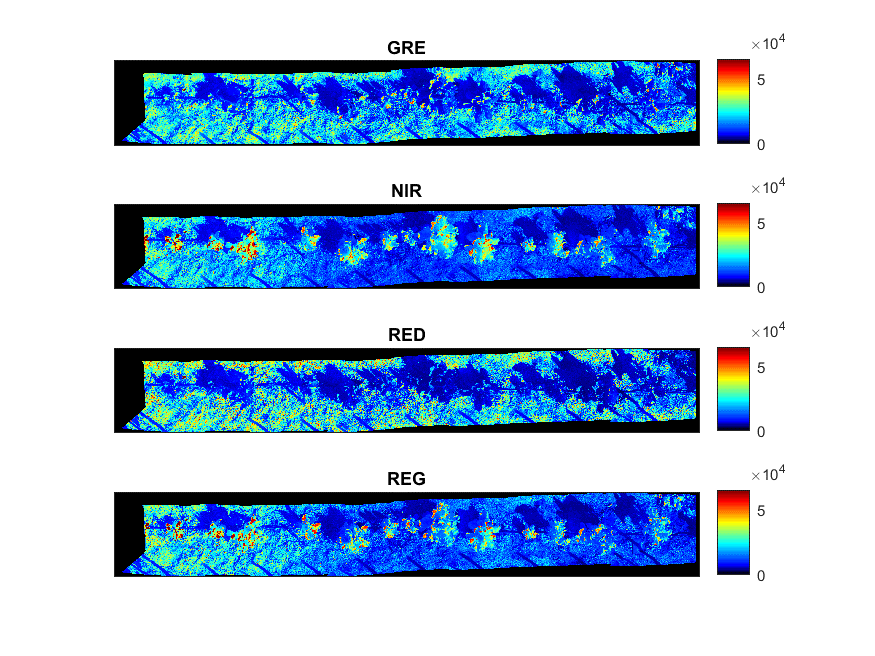
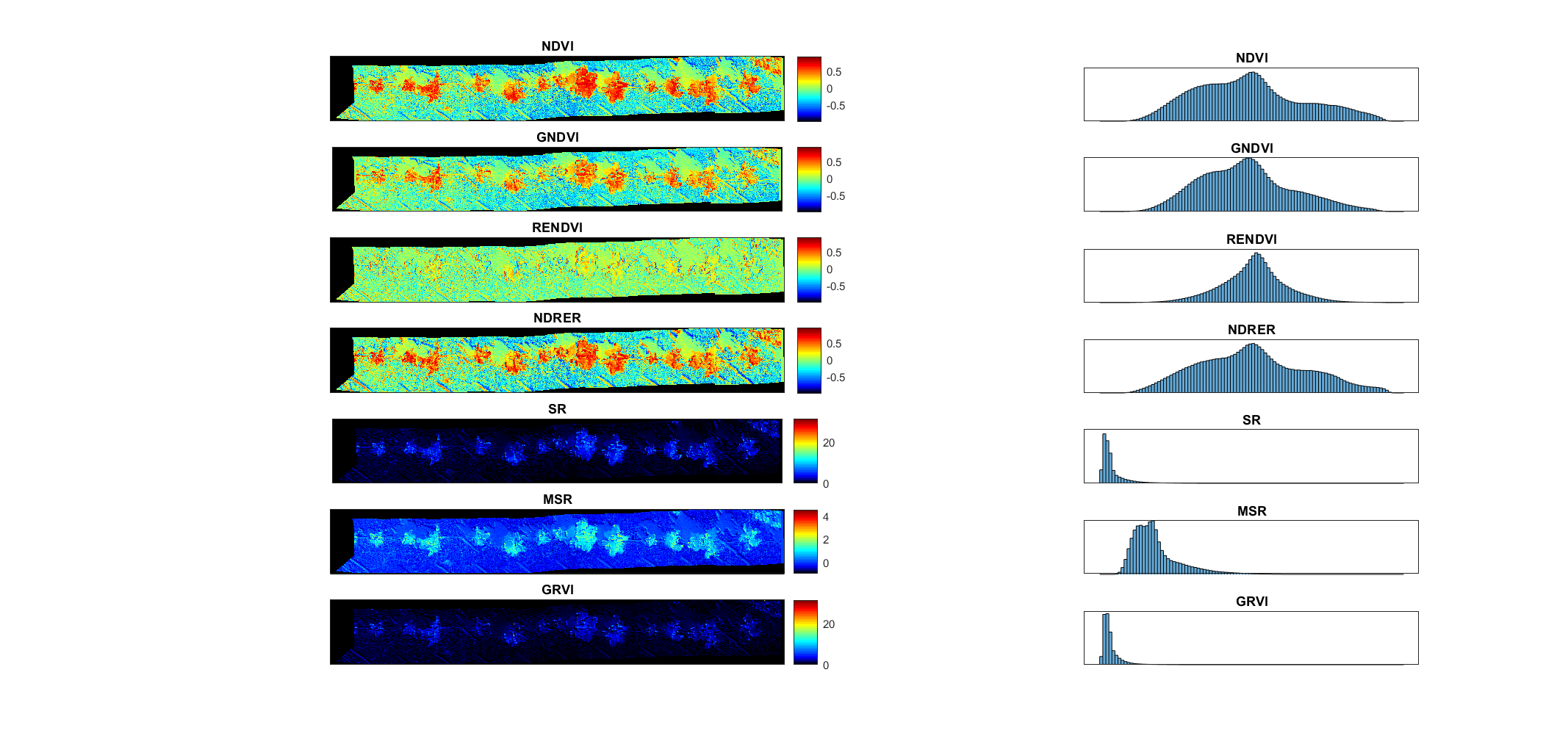
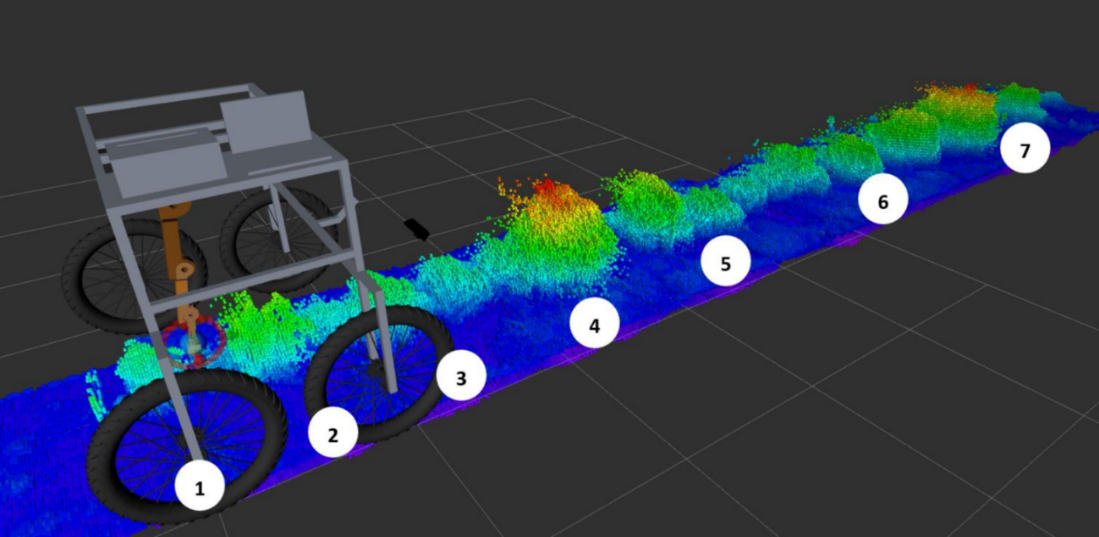
The increasing demand of organic vegetables has driven conventional farmers to change their businesses in order to develop organic methods for cultivation and the use of alternative techniques to avoid damaging the soil and the quality of the products. In some cases, to enhance biodiversity and soil fertility, crops are established in a mixed pattern called ‘strip cropping’ where single or dual lines of a given species are alternated with a second compatible species, with the aim to enhance resilience, system sustainability, local nutrient recycling, and soil carbon storage. However, this husbandry of crops grown and mixed in a strip design pose new challenges regarding mechanisation, which in many cases can only be overcome by increasing human tasks. To counteract the additional labour of a multi-crop system, one of the main objectives of the ‘Sureveg’ CORE Organic Cofund ERA-Net European project is to evaluate the benefits of growing in alternate rows for the production of organic vegetables and includes the use of robots as a tool to facilitate the automation of the process, allowing the individual treatment of organic fertilization at plant level. Within the project framework a modular proof-of-concept version has been produced, combining several sensing technologies (3x LiDAR, plus a multispectral RGB-NIR camera) with actuation in the form of a robotic arm operating upside down. The present work describes a method to develop fertilization tasks with recycled organic waste in strip-cropping farms, based on detection of plant species (cabbage) using and liquid fertilizer application with a robot. For that, it is necessary to identify the crop (variable in the rows) and place the robot with respect to the plants to apply the product. Test fields were located at ETSIAAB - UPM (40°26’33.1"N, 3°43’41.9"W) where stripped crops were established and monitored along the growing season. In order to detect autonomously each single plant, point clouds of the three LiDAR units were combined, soil was removed applying a weighted threshold, and plants were identified using clustering and convolutional neural network methodologies. To trigger the actuation system, the decision on which plant had to be sprayed with the liquid fertilizer was taken according to two factors: 1) the estimated volume of every single plant, and 2) the multispectral indexes calculated using the RGB-NIR camera. The prototype is fully functional, and further test are needed to quantify its performance
| EPrint Type: | Conference paper, poster, etc. |
|---|---|
| Type of presentation: | Paper |
| Keywords: | organic farming, robot, actuation system, fertilization, LiDAR, multispectral camera |
| Agrovoc keywords: | Language Value URI English robots http://aims.fao.org/aos/agrovoc/c_25680 English fertilizer application http://aims.fao.org/aos/agrovoc/c_10795 English single plant UNSPECIFIED |
| Subjects: | Environmental aspects > Biodiversity and ecosystem services Farming Systems > Farm nutrient management |
| Research affiliation: | European Union > CORE Organic > CORE Organic Cofund > SUREVEG Spain > CSIC (Spanish National Research Council) Spain > Polytechnic University of Madrid |
| Deposited By: | Valero, Constantino |
| ID Code: | 43101 |
| Deposited On: | 10 Jan 2022 07:48 |
| Last Modified: | 10 Jan 2022 07:48 |
| Document Language: | English |
| Status: | Published |
| Refereed: | Peer-reviewed and accepted |
Repository Staff Only: item control page
 Download Statistics
Download Statistics Download Statistics
Download Statistics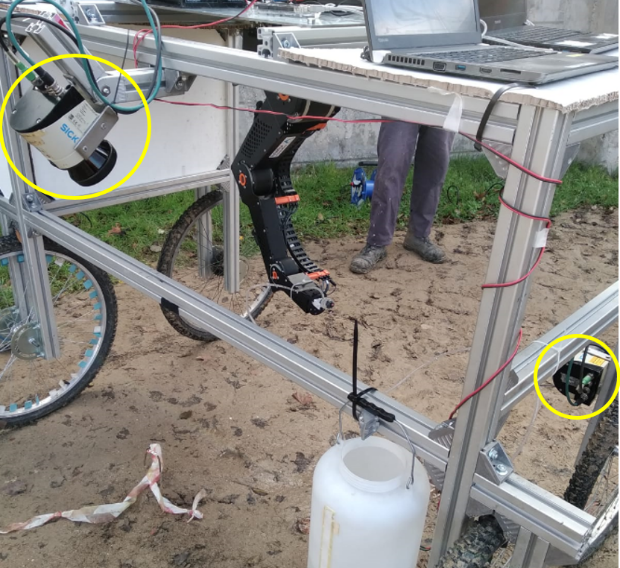{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}